Es folgt der letzte Auszug aus meinem neuen Buch „Unglaubliche Geschichten aus dem Weltraum: Ein Blick hinter die Kulissen der Missionen, die unsere Sicht auf den Kosmos verändern“. Das Buch bietet einen Einblick in mehrere aktuelle NASA-Robotermissionen. Dieser Auszug ist Teil 3 von 3, der hier im Space Magazine in Kapitel 2, „Roving Mars with Curiosity“, veröffentlicht wurde. Sie können Teil 1 hier und Teil 2 hier lesen. Das Buch ist in gedruckter Form oder als E-Book (Kindle oder Nook) bei Amazon und Barnes & Noble erhältlich.
Wie man einen Mars Rover fährt
Woher weiß Curiosity, wo und wie man über die Marsoberfläche fährt? Sie können sich vorstellen, dass Ingenieure bei JPL Joysticks verwenden, ähnlich denen, die für ferngesteuertes Spielzeug oder Videospiele verwendet werden. Im Gegensatz zu RC-Fahren oder Spielen verfügen die Mars-Rover-Fahrer jedoch nicht über sofortige visuelle Eingaben oder einen Videobildschirm, um zu sehen, wohin der Rover fährt. Und genau wie bei der Landung gibt es immer eine Zeitverzögerung, wann ein Befehl an den Rover gesendet wird und wann er auf dem Mars empfangen wird.
"Aufgrund der Zeitverzögerung wird nicht in Echtzeit interaktiv gefahren", erklärte John Michael Morookian, der das Team der Roverfahrer leitet.
Die eigentliche Berufsbezeichnung von Morookian und seinem Team lautet "Rover Planners" und beschreibt genau, was sie tun. Anstatt die Rover per se zu „fahren“; Sie planen die Route im Voraus, programmieren spezielle Software und laden die Anweisungen auf Curiosity hoch.
"Wir verwenden Bilder, die vom Rover seiner Umgebung aufgenommen wurden", sagte Morookian. „Wir haben eine Reihe von Stereobildern von vier Schwarzweiß-Navigationskameras sowie Bilder von den Hazcams (Gefahrenvermeidungskameras), die von hochauflösenden Farbbildern der MastCam unterstützt werden, die uns Details über die Beschaffenheit des Geländes liefern voraus und Hinweise auf Arten von Gesteinen und Mineralien am Standort. Dies hilft, Strukturen zu identifizieren, die für die Wissenschaftler interessant aussehen. “
Mit allen verfügbaren Daten können sie mit einer speziellen Software, dem Rover Sequencing and Visualization Program (RSVP), eine dreidimensionale Visualisierung des Geländes erstellen.
"Dies ist im Grunde ein Mars-Simulator, und wir haben eine simulierte Neugier in ein Panorama der Szene eingefügt, um zu visualisieren, wie der Rover auf seinem Weg fahren könnte", erklärte Morookian. „Wir können auch eine Stereobrille aufsetzen, mit der unsere Augen die Szene in drei Dimensionen sehen können, als wären wir mit dem Rover dort.
In der virtuellen Realität können die Roverfahrer die Szene und den Rover manipulieren, um jede Möglichkeit zu testen, welche Routen die besten sind und welche Bereiche zu vermeiden sind. Dort können sie alle Fehler machen (in einer Düne stecken bleiben, den Rover kippen, gegen einen großen Felsen stoßen, einen Abgrund abfahren) und die Fahrsequenz perfektionieren, während der echte Rover auf dem Mars sicher bleibt.
„Die Wissenschaftler überprüfen die Bilder auch auf interessante Funktionen und wenden sich an die Rover-Planer, um einen Pfad zu definieren. Dann stellen wir die detaillierten Befehle zusammen, die erforderlich sind, um die Neugier auf diesem Weg von Punkt A nach Punkt B zu bringen “, sagte Morookian. "Wir können auch die Befehle einbinden, die erforderlich sind, um dem Rover die Richtung zu geben, mit der er mithilfe seines Roboterarms Kontakt mit dem Standort aufnehmen soll."

Daher wird dem Rover jede Nacht befohlen, acht Stunden lang abzuschalten, um seine Batterien mit dem Atomgenerator aufzuladen. Aber zuerst sendet Curiosity Daten an die Erde, einschließlich Bildern des Geländes und aller wissenschaftlichen Informationen. Auf der Erde nehmen die Rover-Planer diese Daten, erledigen ihre Planungsarbeiten, vervollständigen die Softwareprogrammierung und strahlen die Informationen zurück zum Mars. Dann wacht Curiosity auf, lädt die Anweisungen herunter und macht sich an die Arbeit. Und der Zyklus wiederholt sich.
Curiosity verfügt außerdem über eine AutoNav-Funktion, mit der der Rover Bereiche durchqueren kann, die das Team in Bildern noch nicht gesehen hat. Es könnte also über den Hügel und die andere Seite hinunter in unbekanntes Gebiet gehen, wobei das AutoNav potenzielle Gefahren erkennt.
"Wir verwenden es nicht zu oft, weil es rechenintensiv ist, was bedeutet, dass der Rover viel länger braucht, um in diesem Modus zu arbeiten", sagte Morookian. "Wir finden es oft besser, am nächsten Tag zu kommen, sich die Bilder anzusehen und so weit wie möglich zu fahren."

Als Morookian mir die verschiedenen Räume zeigte, die von Rover-Planungsteams bei JPL genutzt wurden, erklärte er, wie sie über verschiedene Zeiträume hinweg arbeiten müssen.
„Wir haben nicht nur die tägliche Routenplanung“, sagte er, „sondern führen auch eine langfristige strategische Planung mit Orbitalbildern der HiRISE-Kamera auf dem Mars Reconnaissance Orbiter durch und wählen Pfade basierend auf den Merkmalen aus der Umlaufbahn. Unser Team arbeitet strategisch und sucht viele Monate, um die besten Wege zu definieren. “
Ein weiterer Prozess namens Supra-Tactical sieht erst in der nächsten Woche vor. Dies beinhaltet, dass Wissenschaftsplaner die Arten von Aktivitäten verwalten und verfeinern, die der Rover kurzfristig ausführen wird. Da niemand mehr im Team auf der Marszeit lebt, arbeiten die Rover-Planer freitags die Pläne für mehrere Tage aus.
"Da wir nicht am Wochenende arbeiten, enthalten die Freitagspläne mehrere Aktivitäten", sagte Morookian. "Zwei parallele Teams entscheiden, an welchen Tagen der Rover fährt und an welchen Tagen er andere Aktivitäten ausführt, z. B. die Arbeit mit dem Roboterarm oder anderen Instrumenten."
Die Daten, die über das Wochenende vom Rover stammen, werden jedoch überwacht. Wenn ein Problem auftritt, wird ein Team hinzugezogen, um eine detailliertere Bewertung vorzunehmen. Morookian gab an, dass sie das Notfallwochenende-Team mehrmals engagieren mussten, aber bisher gab es keine ernsthaften Probleme. "Es hält uns jedoch auf Trab", sagte er.
Der Rover verfügt über eine Reihe reaktiver Sicherheitsüberprüfungen der Gesamtneigung des Roverdecks und der Artikulation des Aufhängungssystems der Räder. Wenn der Rover also über ein zu großes Objekt fährt, stoppt er automatisch.
Neugier war nicht auf Geschwindigkeit ausgelegt. Es wurde entwickelt, um an einem Tag bis zu 200 Meter weit zu fahren, aber in einem Sol fährt es selten so weit. Bis Anfang 2016 war der Rover insgesamt 12 km über die Marsoberfläche gefahren.

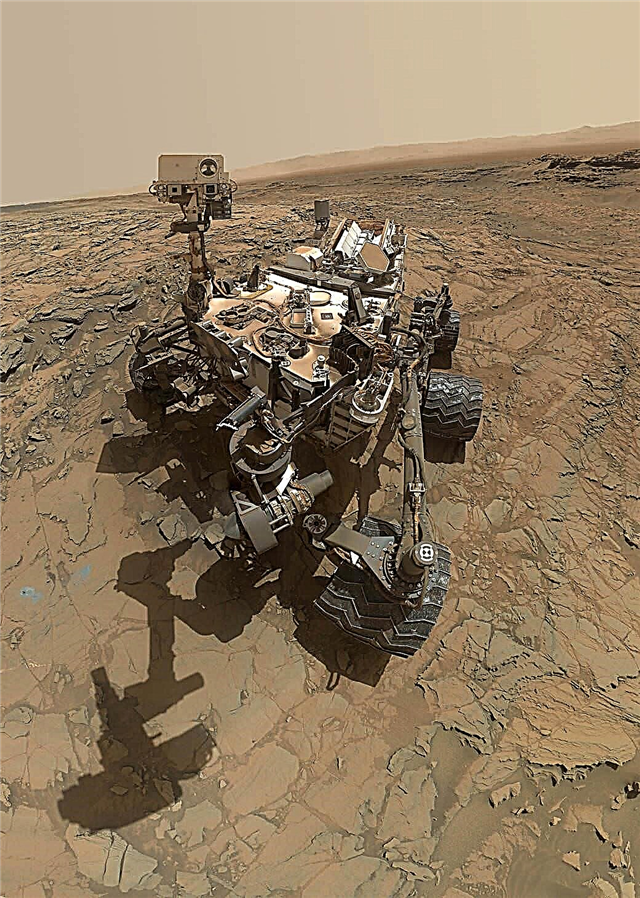
Es gibt verschiedene Möglichkeiten, um festzustellen, wie weit Curiosity gereist ist, aber die genaueste Messung heißt "Visual Odometry". Curiosity hat spezielle Löcher in Form von Morsecode-Buchstaben in seinen Rädern, die "JPL" buchstabieren - eine Anspielung auf das Haus der Wissenschafts- und Ingenieurteams des Rovers - auf dem Marsboden.
"Visuelle Kilometerzähler vergleichen die neuesten Stereobilder, die ungefähr jeden Meter über dem Laufwerk gesammelt wurden", sagte Morookian. „Einzelne Merkmale in der Szene werden aufeinander abgestimmt und verfolgt, um zu messen, wie die Kamera (und damit der Rover) im dreidimensionalen Raum zwischen den beiden Bildern verschoben und gedreht wurde, und sie zeigt uns in einem sehr realen Sinne, wie weit Curiosity gegangen ist . ”
Eine sorgfältige Überprüfung der Rover-Spuren kann Aufschluss über die Art der Traktion der Räder geben und darüber, ob sie durchgerutscht sind, beispielsweise aufgrund hoher Steigungen oder sandigen Bodens.
Leider hat Curiosity jetzt neue Löcher in den Rädern, die eigentlich nicht vorhanden sein sollten.
Rover Probleme
Morookian und der Projektwissenschaftler Ashwin Vasavada zeigten sich erleichtert und zufrieden, dass Curiosity insgesamt - so weit in der Mission - ein ziemlich gesunder Rover ist. Die gesamte wissenschaftliche Nutzlast ist derzeit nahezu voll ausgelastet. Das Engineering-Team behält jedoch einige Probleme im Auge.
"Um Sol 400 herum stellten wir fest, dass die Räder schneller abgenutzt waren als erwartet", sagte Vasavada.

Und der Verschleiß bestand nicht nur aus kleinen Löchern. Das Team bemerkte Reifenpannen und böse Tränen. Die Ingenieure stellten fest, dass die Löcher durch die harten, gezackten Felsen entstanden waren, über die der Rover während dieser Zeit fuhr.
"Wir haben die Art von" spitzen "Steinen, die Schaden anrichteten, nicht vollständig erwartet", sagte Vasavada. „Wir haben auch einige Tests durchgeführt und gesehen, wie ein Rad ein anderes Rad in einen Felsen schieben kann, was den Schaden verschlimmert. Wir fahren jetzt vorsichtiger und fahren nicht mehr so lange wie in der Vergangenheit. Wir konnten den Schaden auf ein akzeptableres Maß reduzieren. "
Zu Beginn der Mission ging der Computer von Curiosity mehrmals in den "abgesicherten Modus", da die Software von Curiosity ein Problem erkannte und die Reaktion darin bestand, weitere Aktivitäten zu verbieten und nach Hause zu telefonieren.
In allen Modulen und Instrumenten wird eine spezielle Fehlerschutzsoftware ausgeführt. Wenn ein Problem auftritt, stoppt der Rover und sendet Daten, die als „Ereignisaufzeichnungen“ bezeichnet werden, an die Erde. Die Aufzeichnungen enthalten verschiedene Kategorien von Dringlichkeit, und Anfang 2015 sandte der Rover eine Nachricht, die im Wesentlichen lautete: „Das ist sehr, sehr schlecht.“ Die Bohrmaschine am Arm des Rovers hatte eine Schwankung des elektrischen Stroms erfahren - wie ein Kurzschluss.
"Die Software von Curiosity kann Kurzschlüsse erkennen, wie den Erdschlussunterbrecher, den Sie in Ihrem Badezimmer haben", erklärte Morookian, "außer dieser sagt Ihnen," das ist sehr, sehr schlecht ", anstatt Ihnen nur ein gelbes Licht zu geben."
Da das Team nicht zum Mars gehen und ein Problem beheben kann, wird alles behoben, indem entweder Software-Updates an den Rover gesendet oder die Betriebsverfahren geändert werden.

"Wir sind jetzt nur vorsichtiger bei der Verwendung des Bohrers", sagte Vasavada, "und bohren zu Beginn nicht mit voller Kraft, sondern fahren langsam hoch. Es ist so, wie wir jetzt fahren, vorsichtiger, aber es erledigt immer noch die Arbeit. Es war noch keine große Wirkung. "
Eine leichtere Berührung des Bohrers war auch für die weicheren Schlamm- und Sandsteine erforderlich, auf die der Rover stieß. Morookian sagte, es gebe Bedenken, dass die geschichteten Gesteine unter dem Angriff des Standardbohrprotokolls nicht halten könnten, und passte die Technik so an, dass die niedrigsten „Einstellungen“ verwendet wurden, die es dem Bohrer noch ermöglichen, ausreichende Fortschritte im Gestein zu erzielen.
Die Möglichkeiten, den Bohrer zu verwenden, nehmen jedoch zu, da Curiosity den Berg hinauffährt. Der Rover fährt durch ein von Vasavada als „zielreiches, sehr interessantes Gebiet“ bezeichnetes Gebiet, während das Wissenschaftsteam daran arbeitet, den geologischen Kontext von allem, was sie auf den Bildern sehen, miteinander zu verknüpfen.
Gleichgewicht auf dem Mars finden
Während die Umleitung in Yellowknife Bay dem Team einige wichtige Entdeckungen ermöglichte, verspürten sie den Druck, zum Berg zu gelangen. Scharf, also "fuhr ein Jahr lang wie die Hölle", sagte Vasavada.
Jetzt auf dem Berg besteht immer noch der Druck, das Beste aus der Mission herauszuholen, mit dem Ziel, mindestens vier verschiedene Gesteinseinheiten - oder Schichten - auf dem Berg zu durchqueren. Scharf. Jede Schicht könnte wie ein Kapitel in der Geschichte des Mars sein.

“Erkundung des Berges. Scharf ist faszinierend ", sagte Vasavada," und wir versuchen, eine Mischung aus wirklich großartigen Entdeckungen aufrechtzuerhalten, die uns - wie Sie ungern sagen - verlangsamen und auf dem Berg höher werden. Wenn Sie sich einen Felsen vor Ihnen genau ansehen, werden Sie nie in der Lage sein, diesen anderen interessanten Felsen dort zu betrachten. "
Vasavada und Morookian sagten beide, es sei eine Herausforderung, dieses Gleichgewicht jeden Tag aufrechtzuerhalten - das sogenannte "Knie in der Kurve" oder "Sweet Spot" für die perfekte Optimierung zwischen Fahren und Anhalten für die Wissenschaft zu finden.
Dann besteht das Gleichgewicht zwischen dem Anhalten, um eine vollständige Beobachtung mit allen Instrumenten durchzuführen, und der Durchführung von „Flyby Science“, bei der weniger intensive Beobachtungen gemacht werden.
"Wir nehmen die Beobachtungen, die wir können, und generieren alle Hypothesen, die wir können, in Echtzeit", sagte Vasavada. "Selbst wenn wir noch 100 offene Fragen haben, wissen wir, dass wir die Fragen später beantworten können, solange wir wissen, dass wir genügend Daten erfasst haben."
Das Hauptziel von Curiosity ist nicht der Gipfel, sondern eine Region in einer Höhe von etwa 400 Metern, in der Geologen die Grenze zwischen Felsen erwarten, die in ihrer Geschichte viel Wasser gesehen haben, und solchen, die dies nicht getan haben. Diese Grenze wird einen Einblick in den Übergang des Mars von einem nassen zu einem trockenen Planeten geben und eine wichtige Lücke im Verständnis der Geschichte des Planeten schließen.

Niemand weiß wirklich, wie lange Neugierde anhält oder ob sie alle wie ihre Vorgänger Spirit and Opportunity überraschen wird. Nachdem sie die „Hauptmission“ von einem Jahr auf dem Mars (zwei Erdjahre) hinter sich gelassen haben und jetzt in der erweiterten Mission sind, ist die einzige große Variable die RTG-Stromquelle. Während die verfügbare Energie stetig abnehmen wird, erwarten sowohl Vasavada als auch Morookian nicht, dass dies für mindestens vier weitere Erdjahre ein Problem sein wird, und mit der richtigen „Pflege“ könnte die Energie ein Dutzend Jahre oder länger dauern.
Sie wissen aber auch, dass es keine Möglichkeit gibt, vorherzusagen, wie lange Curiosity dauern wird oder welches unerwartete Ereignis die Mission beenden könnte.
Das Biest
Hat Curiosity eine Persönlichkeit wie die vorherigen Marsrover?
"Eigentlich nein, wir scheinen diesen Rover nicht wie Menschen mit Spirit and Opportunity zu anthropomorphisieren", sagte Vasavada. "Wir haben uns nicht emotional damit verbunden. Soziologen haben das tatsächlich studiert. “ Er schüttelte amüsiert den Kopf.
Vasavada wies darauf hin, dass dies möglicherweise etwas mit der Größe von Curiosity zu tun hat.
"Ich betrachte es als ein riesiges Tier", sagte er direkt. "Aber überhaupt nicht gemein."

Was diese Mission charakterisieren soll, sagte Vasavada, ist ihre Komplexität in jeder Dimension: die menschliche Komponente, 500 Menschen dazu zu bringen, zusammenzuarbeiten und zusammenzuarbeiten und gleichzeitig die Talente aller zu optimieren; den Rover sicher und gesund halten; und jeden Tag zehn Instrumente am Laufen zu halten, die manchmal völlig unabhängige wissenschaftliche Aufgaben erledigen.
"Jeder Tag ist unsere eigene kleine" sieben Minuten des Terrors ", in der jeden Tag so viele Dinge richtig laufen müssen", sagte Vasavada. „Es gibt eine Million potenzieller Probleme und Interaktionen, und Sie müssen ständig darüber nachdenken, wie etwas schief gehen kann, denn es gibt eine Million Möglichkeiten, wie Sie es vermasseln können. Es ist ein komplizierter Tanz, aber zum Glück haben wir ein großartiges Team. "
Dann fügte er mit einem Lächeln hinzu: "Diese Mission ist jedoch aufregend, auch wenn es ein Biest ist."
"Unglaubliche Geschichten aus dem Weltraum: Ein Blick hinter die Kulissen der Missionen, die unsere Sicht auf den Kosmos verändern" wird von Page Street Publishing, einer Tochtergesellschaft von Macmillan, veröffentlicht.