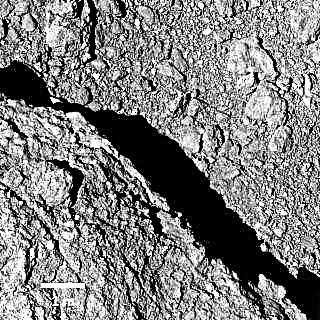
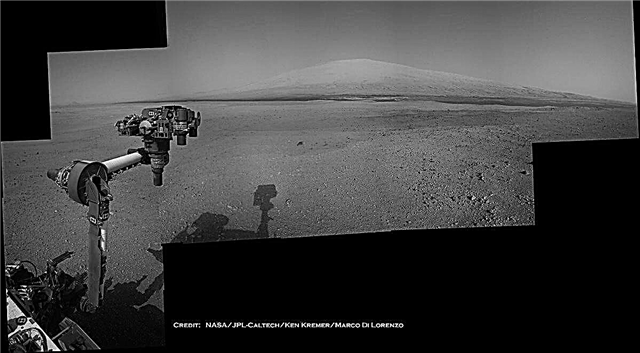
Bildunterschrift: Neugierdepunkte für Mount Sharp. Dieses Mosaik des Roboterarms wurde aus Navigationskamerabildern der Sols 2, 12 und 14 zusammengesetzt und zeigt den 18.000 Fuß hohen Mount Sharp im Hintergrund und den Schatten des Kopfes des Marsroboters in der Mitte. Curiosity sucht mithilfe des Roboterarms und eines Neutronendetektors am Körper nach hydratisierten Mineralien. Bildstich und -verarbeitung von Ken Kremer und Marco Di Lorenzo. Bildnachweis: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Am Montag (20. August) bewegte Curiosity zum ersten Mal ihren mächtigen Roboterarm und richtete den handähnlichen Werkzeugturm direkt auf Mount Sharp, ihr ultimatives Fahrziel.
Wenn Sie genau sehen möchten, wohin Curiosity geht und warum sie zum Gale Crater geschickt wurde, schauen Sie sich einfach das neue Mosaik an, das Ken Kremer und Marco Di Lorenzo zusammengestellt haben.
Die Neugier zeigt mit ihrem Roboterarm direkt auf den Mount Sharp, den riesigen, 5,5 Kilometer hohen, mysteriösen Hügel, der das Zentrum des 154 km breiten Kraters bedeckt. Unser Mosaik wurde auf der Titelseite von NBC News und in einem neuen Artikel von Alan Boyle prominent vorgestellt - hier
Die geschichteten Sedimente in Mount Sharp könnten die geologische Geschichte des Mars enthüllen, die Milliarden von Jahren zurückreicht, und zeigen, warum der Planet von einer alten, feuchten Periode fließenden flüssigen Wassers an der Oberfläche in die trockene, ausgetrocknete Ära von heute überging.
Als Curiosity den 2,1 m langen Arm löste und anhob und in Richtung Mount Sharp griff, machten die am Mast montierten Navigationskameras auf ihrem Kopf eine Reihe von Schwarzweißbildern, die den Schatten des neuesten Marsroboters der NASA enthielten. Der 6-Rad-Rover in Wagengröße hat vor knapp zwei Wochen einen erschütternden, punktgenauen Touchdown durchgeführt.
Der Arm ist entscheidend für den Erfolg der Mission, da er zum Manövrieren eines hoch entwickelten Turmes verwendet wird, der am Waffenende montiert und mit wissenschaftlichen Instrumenten beladen ist. Es wiegt saftige 30 kg und hat einen Durchmesser von etwa 2 Fuß. Der Turm enthält eine hochauflösende fokussierbare Farbkamera, einen Bohrer, ein Röntgenspektrometer, eine Schaufel und Mechanismen zum Sieben und Portionieren von Gesteins- und Bodenpulverproben.
„Wir fahren weiterhin Homeruns. Wir haben den Roboterarm entstaut und uns die Werkzeuge am Ende des Arms angesehen “, sagte Michael Watkins, Manager der Curiosity Mission vom Jet Propulsion Lab (JPL) der NASA, bei einer Pressekonferenz am Dienstag, den 21. August Schweizer Taschenmesser dort, wo wir viele Instrumente haben. Wir wollten sicherstellen, dass all das funktioniert, indem wir diese ersten Motorprüfungen durchführen. Das alles lief erfolgreich. “
Watkins sagte, das Team sei begeistert, endlich Bilder des auf dem Mars eingesetzten Arms zu sehen, nachdem es Tausende von technischen Testbildern gesehen habe.
"Wir haben uns in unserer Testumgebung tausende Male Bilder angesehen, und ich sehe dort immer die Wände des Testlabors. Es ist einfach ein großartiges Gefühl, den Arm dort draußen mit dem Mars im Hintergrund zu sehen."
Der nächste Schritt sind weitere Tests, um den Nutzen und die Bewegungen der Arme zu bestätigen und die Instrumente zu kalibrieren. "Wir werden die Arm-, Bohr- und Verarbeitungseinheit vollständig untersuchen", sagte Louise Jandura von JPL, Chefingenieurin des Probensystems für Curiosity, beim Briefing. „Der Arm hat bereits alle diese Bewegungen auf der Erde ausgeführt, aber in einem anderen Schwerkraftzustand, und diese Schwerkraft spielt eine Rolle. Unser Turm am Ende des Arms wiegt so viel wie ein kleines Kind, und die Unterschiede in der Schwerkraft verändern den Durchhang am Ende des Arms. Wir möchten diese Endpunktpositionen fein einstellen können. Es wird also einige Zeit dauern, bis der Arm auf Herz und Nieren geprüft ist. “
Darüber hinaus wackelt Curiosity mit ihren Rädern und ist bereit, am Mittwoch ihre erste Mars-Probefahrt zu machen.
"Spät heute Abend planen wir, Curiosity die Befehle für unsere erste Fahrt morgen zu senden", sagte Watkins. „Curiosity wird ungefähr 10 Fuß fahren, rechts abbiegen und dann wieder hochfahren, damit ihre Hinterräder ungefähr dort landen, wo sich ihre Vorderräder jetzt befinden. Die Kameras werden die Strecken fotografieren und die Leistung der Curiosity-Fahrfähigkeit und die Weichheit des Oberflächenbodens bewerten. “
Der 1-Tonnen-Megaroboter ist außerdem mit dem von Russland bereitgestellten DAN-Instrument (Dynamic Albedo of Neutronen) ausgestattet, mit dem in den obersten drei Fuß (1 Meter) des Bodens unter dem Rover nach Wasser gesucht wird, das als Hydrate in Mineralien gebunden ist.
"Die Neugier hat begonnen, Neutronen in den Boden zu schießen", sagte Igor Mitrofanov vom Weltraumforschungsinstitut in Moskau, Hauptforscher für DAN. "Wir messen die Menge an Wasserstoff im Boden, indem wir beobachten, wie die Neutronen gestreut werden, und Wasserstoff auf dem Mars ist ein Indikator für Wasser."
Das Missionsziel ist es festzustellen, ob der Rote Planet jemals in der Lage war, das vergangene oder gegenwärtige mikrobielle Leben zu unterstützen, und während der zweijährigen primären Missionsphase nach Lebenszeichen in Form organischer Moleküle zu suchen.

Bildunterschrift: Panorama-Vista des Mount Sharp (rechts) und des Gale Crater vom Curiosity Rover der NASA auf dem Mars. Die Neugier wird schließlich auf der Suche nach hydratisierten Mineralien den 3,4 Meilen hohen Mount Sharp erklimmen. Diese kolorierten Panorama-Mosaikshows wurden aus neuen Navigationskamerabildern (Navcam) zusammengestellt, die von Curiosity auf Sol 2 und Sol 12 aufgenommen und basierend auf Mastcam-Bildern von Curiosity koloriert wurden. Siehe Schwarzweißversion unten. Bildnachweis: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo Lorenzo - www.kenkremer.com